

ABSTRACT
Abstract : The OSCE is a reliable evaluation method to estimate the preclinical examination of dental students. The most ideal assessment for OSCE is used the augmented reality simulator to evaluate. This literature review investigated a recently developed in virtual reality (VR) and augmented reality (AR) starting of the dental history to the progress of the dental skill. As result of the lacking of technology, it needs to depend on other device increasing the success rate and decreasing the risk of the surgery. The development of tracking unit changed the surgical and educational way. Clinical surgery is based on mature education. VR and AR simultaneously affected the skill of the training lesson and navigation system. Widely, the VR and AR not only applied in the dental training lesson and surgery, but also improved all field in our life.
KEYWORDS: OSCE; Dental simulator; Augmented reality; Virtual reality; Dentistry
INTRODUCTION
With the increase in the elderly population and the economic growth, the concept of oral health gradually increased, and dental and dental health care issues are increasingly important. Due to the high incidence and prevalence of today’s global oral diseases, the global market for oral medical equipment in 2016 was $ 23.99 billion up to 4.0% from 2015, and the market was expected to reach $ 29.09 billion by 2020.2015e2020 growth rate was up to 4.7%, coupled with the incidence of the poor than other socio-economic groups. The oral disease has become an important public health problem, and promote the global oral medical market continues to grow.
In addition, according to World Health Organization statistics show that more than 60% of school-age children worldwide and nearly 100% of adults have dental caries status, and 35e44 years of adult population, nearly 20% suffering from severe teeth disease, follow-up will lead to the possibility of missing teeth. As for the 65e74 year old population, the total tooth loss rate is as high as nearly 30% [1]. With the increase in the number of elderly population and the increasingly aging society, coupled with the majority of elderly people in the treatment rate is generally low. It will lead to long-term sustained increase in oral medical needs.
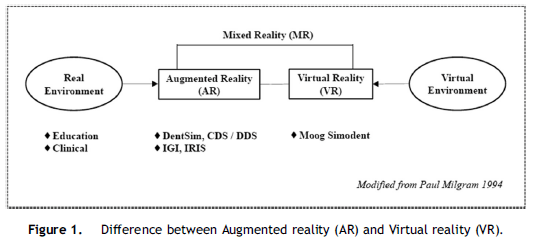
Nowadays, there are a lot of skills about the progresses in the computer-based technologies such as augmented reality (AR) and virtual reality (VR). In the two kinds of reality, AR is the first application began to widely use. AR, in which 3D virtual objects are integrated into a 3D real environment in real time. AR is to “virtualize” the virtual image into the real space, creating a completely virtual space around the user’s eyes to replace the real space. To make the users see a world which have a real environment and generated by the computer graphics over a real scene [2]. And the VR offered the users a real, inside virtual 3D model [3e5]. According to the display, to build a three dimensional, seemingly true virtual world in the user’s eyes. Recently, VR also designed head mount display with special glasses to cover the user’s surrounding vision to achieve the interaction situation.
With the increasing demand for dental implants, the dentist-related faculties or post-graduated year (PGY) professional competencies, clinical training and experience accumulation are more important, and these technologies are directly reflected in the school’s education. Through the complete education and training with realistic exercises and assessments, in order to training a dentist. Therefore, whether it is on the education side or the clinical side, increasingly mature technology development developed by the auxiliary products will become more and more important role in the surgery and education training process.
The history of dentistry
The history of dentistry is almost as long as the history of human civilization. The progress of science and technology, the application of technology used in the dental became more and more mature. From the initial, using pliers to remove the tooth, wire to lock loose teeth, and the dental appliance and dental bridge. To the beginning of the 17th and 18th century, using the tooth filling [6], gradually developed to the initial bone as a denture concept to replace the loose teeth. To use the tooth sets of metal wire and fixed appliance techniques to correct the tooth position [7]. Until today, dental expertise is currently used to prevent and treat common oral diseases, namely dental caries and periodontal disease, and the field also includes common repair, extraction, implant, root canal therapy and calculus removal.
Nowadays, dentists in the United States and European countries must pass both written and technical examinations before obtaining a license. Dentistry in Japan and China also has fully implemented the above mentioned examination policies. In view of this, enough practice, professional knowledge in medical and dental colleges. The better way of learning is without question a developing trend for global dental education. Learning educational equipment and method built around such technology will be a must-have for dental universities around the world.
Informative technological advances in dentistry
With the advanced development of Information Technology (IT), dental solutions lead by computer and internet technologies have made significant progress all over the world. Digital dental solutions will be the trend for the professional dental field in the future. The rapid development of digital dental solutions has been applied in both the clinical dental field as well as the dental education field. This trend will gradually challenge both traditional dental clinical practices and dental education learning methods.
With the medical image of the increasingly mature can help physicians to identify the patient’s affected area and to make a different cure. The new technology which assisted the doctor has gradually been mature. The Image-guided therapy (IGT) and Image-guided interventions (IGI) technology development the image recognition and location of tracking system , coupled with computer computing, combined computed tomography, position tracker, display and PC to achieve tracking location and surgical instruments immediately. By calculating the position of the medical images and surgical tools , to provide more accurate accuracy in the surgical position or learning lesson Recently, the current of article about the nerve surgery published in PubMed more than 1400 . In the nerve surgery also combined with the above technology to achieve the effect of surgical real-time. And because good image clarity will affect the overall system of precision , medical imaging such as CT technology advances, with a good tracking system also reduces the risk of surgery and mistakes.
Educational applications of dentistry
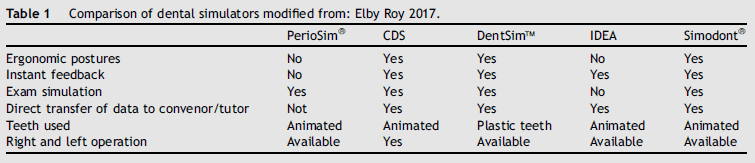
Dr. John M. Harris opened the world’s first dental school in Bridge, and helped establish the dental establishment as a health career . The school was opened on February 21, 1828 and is now the Harris Dental Museum . Studies have shown that graduates who graduated from different countries or different dental schools may have different clinical decisions for the same clinical condition . This means that in each country or school has its own teaching and scoring methods. The primary issue about VR and AR that to achieve the standard score way can be standardized to facilitate student learning and practicing. Now there are several systems and devices using VR and AR [Table 1] , through the tracking system to achieve handpiece and the screen synchronization, the characteristics of the system equipment and comparison as follows: Which DentSim™ is a complete system that incorporates VR and AR with its system included ergonomic postures, instant feedback, exam simulation; direct transfer of data to programmer and the system can be used in the campus . According to the system with VR and AR not only integrate systems for learning and teaching from an organizational perspective but also training skills and improve the hand-eye coordinate . The results that system can improve the users correct the posture and skills. And some prove showed that lots of the information technology about VR and AR can train the users and make them familiar with the system, skill and the lesson A system with VR and AR would become an educational tool to make the students learn by themselves and some reports proved that it can decrease faculty time by fivefold when compared to traditional preclinical teaching methods .
A complete VR and AR system in the hardware, there are the teeth model, handpiece with the motor, different brand of the burs and the air and water in-and-out. In the software, it included the simple registration to make the position of the instruments in the system and the real-time tracking with correct accuracy. And it could offer different lessons to let the students learn. A different lesson included cavity preparation, crown and bridge and access preparation. According to different lessons may make the students and PGY practice and be familiar with different symptoms.
Which another system, CDS-100, designed by the EPED Inc. Computerized Dental Simulators is dental training systems applied with new technology such as VR and AR. This technology provides the best computer training system for dental students and PGY dentists in need of self-training. Some advantages are as followed:Optical positioning system provides 3D real-time accurate feedback of optimal teeth’s angle, depth, and abundant software lessons (Operative Dentistry, Endodontics, Crown and Bridge and Pedodontics) provided students easy self-learning and practicing with digital guide and simulations. Courses & Lessons can be customized and designed as well as upgraded for specific projects. Abundant accessories included the system, such as tooth model, teeth, different brand burs, manikin chair, shadow-less lamp and the posture evaluation system. And the brand of the tooth, tooth model also can be used in the system. According to another system, the Implant Real-time Imaging System (IRIS), the doctors also can be offered the complete education and experience about the implantology and clinical treatment. Objective Structured Clinical Examination (OSCE) incorporated into the operative dentistry software curriculum. With a Computerized-Objective Evaluation System, teachers can set up and highlight the score percentage with easy way. Teachers can evaluate students’ learning status through digital reports to further strengthen students’ learning objectives. Evaluation reports with figures and descriptions offer easy self-learning and comparison studies to improve clinical practice and precision. And according the record, students can review the progress and find the mistake to improve the skills. In the lesson, broadcasting function provides teachers a way to easily present and demonstrate to observing students via remote connect. Broadcasts can be done in real-time or at the student’s convenience. Broadcast and playback features provide an effective solution to solve the imbalance ratio between teachers and students, as well as provide an educational tool for college assessment and improvement rankings. Through the digital dental simulators and clinical environment, it is easy for students’ to self-practice, allowing them to gain crucial clinical experience and precision.
Another system, Moog Simodont Dental Trainer, is also a training system for dental schools. The system can help students progress faster and realize the progress, also can offer the teacher plan students work efficiently and track the students’ progress. The system target is that training the students’ skill such as removing tooth decay, preparing crowns with different dental burrs. Customized cases can be created and students’ work traced and evaluated by software and teachers. Moog Simodont Dental Trainer combines Moog’s expertise in haptic technology and ACTA’s (Academic Center for Dentistry in Amsterdam) experience in dental education to help students practice more efficiently and learn faster.
These three systems have their features, like Moog, according to competence oriented with immediate feedback, no water lines, plastic teeth and no burr consumption. And such as CDS-100 and DentSim™, by the visible device, the users can see and use the real handpiece and teeth to learn and compare the visual and the reality teeth. Such like CDS-100 has a OSCE and objective evaluation (Fig. 1). The real-time observation in the visual and real teeth, customized and abundant lesson, high accuracy and evaluation are a good and standardized tool for the all students and PGY.
Clinical application of dentistry
With the development of dental technology, the system combined the surgical instruments, tracking system, medical images and computer became to the real-time navigation technology . The tracking system has a different component to composed, and according to the work of component distinguish different types, such as electromagnetic and optical tracking system . At first, the navigation system is not mature enough to exceed the stereolithographic surgical guide of the accuracy. The method of the surgical guide expressed high precision than the navigation system . The position or place of the registration is important for the accuracy of the navigation system. The wrong place would produce the larger error. So according to the intended use of the navigation system, there are the different ways of registration . Although the navigation played an important role but also the high quality medical images would make the clear information in the patient. High quality medical images would increase the rate of the surgery . There are some reasons to affect the accuracy of the navigation system, such as integrated component, medical images accuracy, surgical tracking unit, registration accuracy and targeting. Many reasons because of the progress of the visual reality, they became to be overcome . Currently, the navigation system became mature, the acculturate accuracy expressed better expression than the surgical guide . There is a mature system, IGI (DenX Advanced Dental system), showed good expression in the dental surgery . It played an important role in the dental implant technology. Especially, it is necessary to ensure the success rate and decrease the risk of dental implants. Traditional dental implants must be local anesthesia, and the scalpel flap treatment. It needs to wait for 3–4 months after surgery until the wound healing in order to install dentures, and because the dental inconvenient, resulting in occlusion dysfunction occurs. After the navigation system and the advanced development in the surgical instruments, it can be through the pre-surgical plan to adjust and plan a precise placement of the implant, not only greatly shorten the operation time because of the small wound or even the flapless surgery , but also accurately predict and avoid the nerve. By the way, there are some cases about investigating the patient using the navigation system, the situation of the wound and the implant position. As the report, after one year, the situation of the recovery is good . Another system, Iris-100 (Implant Real-time Imaging system), designed by the EPED Inc., also can achieve the same function like IGI. According to CT images, Iris-100 can make the images dynamic to control the situation in real-time in the implant region. The Iris-100 system monitored the drills’ depth and angle to achieve the best effect in the lowest risk. By the CT images, doctors can do the pre-surgical planning which can lead the drills’ position in the surgery. Abundant customized hand piece and drills, tissue punch also combined and applied in the navigation to achieve the special surgical case and flapless surgery. Navigation system is the best assistant tool, by the process of guiding system, you can clearly distinguish the location of the implant, and the direction and depth. To reduce the pain of patients due to surgery, although the computer navigation may not be 100% accurate, there is need to professional physicians on-site real-time monitoring, through a wealth of experience, and the risk of the surgery would decrease.
VR and AR combined the tracking system in real-time in the surgery
The skill of the visual reality became mature, and more and more VR and AR showed on the educational and surgical field. The development of reality devices allow the user to combine the medical information, medical data and incorporate these data visualized. It can provide more clear information and make the users improve safety and lower risk [38]. Although the visual reality and augmented reality in the dental field is not enough common, in other field developed much better, such as the neurosurgery and cranial surgery [39]. The users can use the Head Mount Display (HMD) display to see the medical information and images combined to the surgery [40]. And it can decrease the surgical risk much better than the common visual reality.
Summary
The AR or VR simulators with direct feedback and objective evaluation function may become an important tool in the future of dental OSCE. The development of the VR or AR is a good tool for our society. Not only applied to the education, but also developed in the clinical treatment. We believe that in the future the VR and AR training and lesson can spread and apply to the every department of dentistry to make the student and PGY train their skill by themselves. And because of the complete education and training, in the surgery would decrease the risk and create the safety surgical environment. And in the surgery, the visible can combined the accurate medical images, tracking system, targeting, registration and computed even the HMD system or AR, to help the physicians execute the surgery. Depending on the physicians’ experience and the complete hardware and software, it would build a trustable relation between the patients and doctors.
Source
https://pubmed.ncbi.nlm.nih.gov/29655414/
References
[1] Petersen PE. The world oral health report 2003: continuous improvement of oral health in the 21st centuryethe approach of the WHO global oral health programmer. Community Dent Oral Epidemiol 2003;31:3e24.
[2] Van Krevelen DWF, Poelman R. A survey of augmented reality technologies, applications and limitations. Int J Virtual Real 2010;9:1e20.
[3] Schultheis MT, Rizzo AA. The application of virtual reality technology in rehabilitation. Rehabil Psychol 2001;46:296e311.
[4] Ausburn LJ, Ausburn FB. Desktop virtual reality: a powerful new technology for teaching and research in industrial teacher education. JITE 2004;41:1e16.
[5] Jayaramb S, Connacherb HI, Lyons KW. Virtual assembly using virtual reality techniques. Comput Aided Des 1997;29:575e84.
[6] Andre´ B, Phillipe de G, Pierre F. The first dental surgeon, his work, his actuality. Pierre Fauchard Acad 1993:81e97.
[7] Willems G, Carels CE. Developments in fixed orthodontic ap-pliances. Ned Tijdschr Tandheelkd 2000;107:155e9.
[8] Dimaio S, Kapur T, Cleary K, Aylward S, Kazanzides P, Vosburgh K, et al. Challenges in image-guided therapy system design. Neuroimage 2007;37:S144e51.
[9] Schulz C, Waldeck S, Mauer UM. Intraoperative image guid-ance in neurosurgery: development, current indications, and future trends. Radiol Res Pract 2012;2012, 197364.
[10] Zadik Y, Levin L. Clinical decision making in restorative dentistry, endodontics, and antibiotic prescription. J Dent Educ 2008;72:81e6.
[11] Zadik Y, Levin L. Decision making of Hebrew University and Tel Aviv University Dental Schools graduates in every day dentistry-is there a difference? J Isr Dent Assoc 2006;4:19e23.
[12] Sarika G, Neelkant P, Jitender S, Ravinder S, Sanjeev L. Oral implant imaging: a review. Malays J Med Sci 2015;22:7e17.
[13] Suenaga H, Hoang Tran H, Liao H, Masamune K, Dohi T, Hoshi K, et al. Real-time in situ three-dimensional integral videography and surgical navigation using augmented reality: a pilot study. Int J Oral Sci 2013;5:98e102.
[14] Gulati M, Anand V, Salaria SK, Jain N, Gupta S. Computerized implant-dentistry: advances toward automation. J Indian Soc Periodontol 2015;1:5e10.
[15] Wiles AD, Thompson DG, Frantz DD. Accuracy assessment and interpretation for optical tracking systems. Visual Image Guid Proced Displ 2004;5367:421e32.
[16] Birkfellner W, Watzinger F, Wanschitz F, Ewers R, Bergmann H. Calibration of tracking systems in a surgical environment. IEEE Trans Med Imag 1998;17:737e42.
[17] Papademetris X, DeLorenzo C, Flossmann S, Neff M, Vives KP, Spencer DD, et al. From medical image computing to com-puter aided intervention: development of a research interface for image guided navigation. Int J Med Robot 2009;5:147e57.
[18] Cleary K, Peters TM. Image-guided interventions: technology review and applications. Annu Rev Biomed Eng 2010;12:119e42.
[19]Bhat S, Shetty S, Shenoy KK. Imaging in implantology. J Indian Prosthodont Soc 2005;5:10e4.
[20]Roy E, Bakr MM, George R. The need for virtual reality simu-lators in dental education: a review. Saudi Dent J 2017;29: 41e7.
[21]Verstreken K, Van CJ, Marchal G, Naert I, Suetens P, Steenberghe D. Computer-assisted planning of oral implant surgery: a three-dimensional approach. Int J Oral Maxillofac Implants 1996;11:806e10.
[22]Hollis W, Darnell LA, Hottel TL. Computer assisted learning: a new paradigm in dental education. J Tenn Dent Assoc 2011;91: 14e8.
[23] Gottlieb R, Lanning SK, Gunsolley JC, Buchanan JA. Faculty impressions of dental students’ performance with and without virtual reality simulation. J Dent Educ 2011;75:1443e51.
[24]Zheng JW, Cao X, Lin YH, Zhang JZ, Feng XP. An introduction of DentSim in pre-clinical dental training and practice. Shanghai Kou Qiang Yi Xue 2014;23:749e54.
[25]Schleyer TK, Thyvalikakath TP, Spallek H, Dziabiak MP, Johnson LA. From information technology to informatics: the information revolution in dental education. J Dent Educ 2012; 76:142e53.
[26]Tiu J, Cheng E, Hung TC, Yu CC, Lin T, Schwass D, et al. Effectiveness of crown preparation assessment software as an educational tool in simulation clinic: a pilot study. J Dent Educ 2016;80:1004e11.
[27]Jasinevicius TR, Landers M, Nelson S, Urbankova A. An eval-uation of two dental simulation systems: virtual reality versus contemporary non-computer-assisted. J Dent Educ 2004;68: 1151e62.
[28]Brief J, Edinger D, Hassfeld S, Eggers G. Accuracy of image-guided implantology. Clin Oral Implants Res 2005;16:495e501.
[29]Linte CA, Lang P, Rettmann ME, Cho DS, Holmes 3rd DR, Robb RA, et al. Accuracy considerations in image-guided cardiac interventions: experience and lessons learned. Int J Comput Assist Radiol Surg 2012;7:13e25.
[30]Peacock ZS, Magill JC, Tricomi BJ, Murphy BA, Nikonovskiy V, Hata N, et al. Assessment of the OsteoMark-navigation system for oral and maxillofacial surgery. Oral Maxillofac Surg 2015; 73:2005e16.
[31]Bouchard C, Magill JC, Nikonovskiy V, Byl M, Murphy BA, Kaban LB, et al. Osteomark: a surgical navigation system for oral and maxillofacial surgery. Int J Oral Maxillofac Surg 2012; 41:265e70.
[32]Kang SH, Lee JW, Lim SH, Kim YH, Kim MK. Verification of the usability of a navigation method in dental implant surgery: in vitro comparison with the stereolithographic surgical guide template method. J Cranio Maxillofac Surg 2014;42:1530e5.
[33]Casap N, Wexler A, Eliashar R. Computerized navigation for surgeryof the lower jaw: comparison of 2 navigation systems. J Oral Maxillofac Surg 2008;66:1467e75.
[34]Block MS, Emery RW. Static or dynamic navigation for implant placement-choosing the method of guidance. J Oral Max-illofac Surg 2016;74:269e77.
[35]Casap N, Tarazi E, Wexler A, Sonnenfeld U, Lustmann J. Intraoperative computerized navigation for flapless implant surgery and immediate loading in the edentulous mandible. Int J Oral Maxillofac Implants 2005;20:92e8.
[36]Casap N, Wexler A, Persky N, Schneider A, Lustmann J. Navi-gation surgery for dental implants Assessment of accuracy of the image guided implantology system. J Oral Maxillofac Surg 2004;62:116e9.
[37]Lior S. “Image guided implantology” real-time guidance of dental implant surgery in the operative field using CT scan image. CARS 2002;2002:959e64.
[38]Va´vra P, Roman J, Zonca P, Ihna´tP,Nemec M, Kumar J, et al. Recent development of augmented reality in surgery: a re-view. J Healthc Eng 2017;2017, 4574172.
[39]Guha D, Alotaibi NM, Nguyen N, Gupta S, McFaul C, Yang VXD. Augmented reality in neurosurgery: a review of current con-cepts and emerging applications. Can J Neurol Sci 2017;44: 235e45.
[40] Casap N, Wexler A, Tarazi E. Application of a surgical navi-gation system for implant surgery in a deficient alveolar ridge postexcision of an odontogenic myxoma. J Oral Maxillofac Surg 2005;63:982e8.